# Lecture 14 - AI ### SET09121 - Games Engineering <br /><br /> Leni Le Goff <br /> School of Computing. Edinburgh Napier University --- # Recommended Reading - Artificial Intelligence for Games. Second Edition. Millington and Funge, 2009. - A good resource for anyone interested in game AI. <!-- .element width="30%" --> --- # History of Game AI What is Artificial Intelligence? - AI is the study of the intelligence of machines, and the attempt to replicate human-like intelligence in a machine. - This is a very wide area of study, incorporating not only technical implementations of intelligence, but also psychology, ethics and philosophy. --- # Our View of Game AI - From a games point of view, we will take a very simple outlook: - AI is any algorithm or code that controls the behaviour of one of our game entities. - Therefore, our Pong example back at the start of the module had a form of AI. - It was dumb, but it still behaved in a way that would allow it to be competitive. --- # Academic AI vs... - Academic AI can be (very roughly) broken down into two phases: - Symbolic AI (early days) - Set of knowledge and reasoning algorithms. - Nature-Inspired and Learning AI (modern era) - Inspired by models in nature and statistical inference. - Used in learning, neural networks, genetic algorithms, etc. --- # ...vs Game AI - Game AI is still rooted in the deterministic, classical, symbolic AI era. - Symbolic AI still used extensively in games. - Path finding, state machines, etc. - Modern techniques have been tried, but are rarely successful. - Modern techniques have seen more success in content creation. --- # In the beginning...PacMan - PacMan is recognised as one of the earliest examples of AI in games. - PacMan AI relied on state machine behaviour. - We will look at state machines in a separate lecture. - Game AI did not change much between PacMan in 1979 until the mid 1990s.  <!-- .element width="30%" --> --- # Timeline - In the mid-1990s AI started to become a selling point. - **1994**: Beneath a Steel Sky mentions AI on the box. - **1997**: GoldenEye 007 introduces world sensing, allowing enemies to see allies and notice when they were killed. - **1998**: Thief: The Dark Project and Metal Gear Solid expanded the world sensing concept. - Real-time strategy games also emerged in the 1990s. - **1994**: Warcraft used noticeable path finding techniques. - **1998**: Warhammer: Dark Omen has robust formation motion. - Games also start emerging where AI is the main game mechanic. - **1997**: Creatures. - **2000**: The Sims. - **2001**: Black and White. --- # AI Techniques for Games - There are numerous usable AI techniques applicable for games. - Classical AI techniques - common. - Newer academic techniques - uncommon. - Different techniques accomplish different aspects of behaviour. - Movement of entities. - Decision making for entities. - Strategic (planning) decisions. - Learning from player behaviour. - We will only look at the first two in detail as they are the most common. Other modules look at learning and planning in a general AI context. --- ## Movement --- # Movement and Steering Behaviours - Steering behaviours. - An algorithm which determines how an entity should move. - Can be goal based: - Seek, flee. - Or can be more general: - Patrol, wander. - Steering behaviours are at the base of most game AI. - It allows us to move entities in a certain manner. - Steering behaviours can also be combined to create more complex behaviour. - Look into flocking behaviour to get an idea. - We will look at steering behaviours next week. --- # Path Finding - Path finding is the discovery of the route between two points in a game world. - Information from path finding can be fed into steering behaviours. - Two core techniques: - Waypoints: Points indicating where the agent can go to. - Navigation mesh: A surface that determines areas where the agent can walk. - Two common algorithms: Dijkstra, A*  --- ## Decision Making --- # Decision Making - We are going to look at two types. - State Machines - Decision Trees --- # State machines - Similar to the idea of state modelling in UML. - AI character has a number of possible states. - e.g. attack, hide, run, etc. - Character determines current state based on any number of conditions. - Character will change state when a particular action occurs. - If patrolling and player is spotted then change state to attacking. 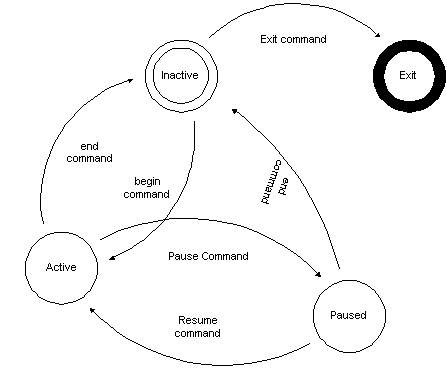<!-- .element width="30%" --> --- # Decision trees - Similar to activity diagrams in UML. - Used to control characters decision making process. - Can also be used to control animation. - Very simple AI technique to implement, but it can be very powerful. 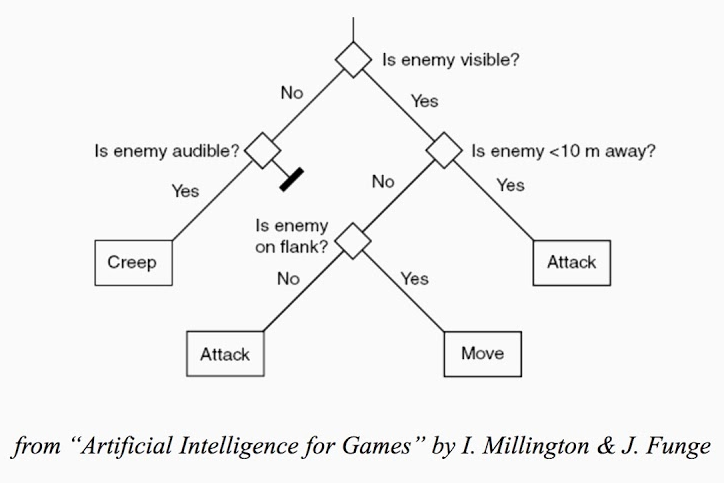<!-- .element width="50%" --> --- # Other Decision Making Techniques **Fuzzy logic** - It is based on fuzzy sets which introduce degree of ownership - Fuzzy logic introduce degree of trueness: instead of being false or true, you have a continuous space [0,1]. - Fuzzy logic can be used in combination with states and continous inputs to have fuzzy decision making.  <!-- .element width="30%" --> --- # Other Decision Making Techniques - Behaviour trees - Model for plan execution, using modular components/nodes. - Markov Chain or process - Similar to state machines but with stochastic transitions: there is a probability to change to the next states. - Goal-oriented behaviour - Character chooses an action based on its current goals. - Rule-based systems - Database of "if" conditions to determine the behaviour to take. - Actually, similar to decision tree. --- # Strategy - World Data - Modern game AI techniques rely on data from the game world. - We will see this more with Path Finding. - Depending on the technique used, different types of data are required. - Movement may need to know about obstacles, jump points. - Knowledge of cover. - Knowledge of other characters in the game world. - etc. - Most of the techniques requiring world data are referred to as strategic techniques. --- # Strategy - Waypoint tactics. - Areas of the map are marked for tactical significance. - For example cover positions, sniper positions, etc. - The AI determines which waypoint to go to, based on an algorithm. - This allows strategic looking behaviour from the game characters. - This technique is used extensively in FPS and similar games. - Tactical path finding. - Takes consideration of the surroundings when determining how to move between waypoints. --- # Strategy - Waypoint tactics. <iframe width="1400" height="800" src="https://www.youtube.com/embed/0i7SMSdwbLI" frameborder="0" allow="accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture" allowfullscreen=""></iframe> --- ## Learning --- # Neural Networks - Neural networks are a popular nature inspired technique. - They are modelled on a simplified idea of the brain. - Neurons get signal input (e.g. through sensors). - Signal gets transformed and distributed to other neurons - Can have learning developed over time. - Researchers and hobbyists see it as a method of believable learning. - So far fallen short on game projects (see Creatures, Fable II).  --- # Other Techniques - Emergent behaviour. - Evolutionary Algorithms and Reinforcement Learning - An agent behaviour is parametrized with a set of values - Iteratively, set of values are tested and evaluated with a goal function. - Bio-inspired algorithms. - Ant colony optimisation. - Artificial immune systems. - Depending on your programme you might study some of these: - Multi-agent systems. - Computational intelligence. - Emergent computing for optimisation. --- # Issues With These Techniques - The learning techniques often lack designer control - They are 'black boxes' and stochastic - This makes it hard to tune the AI agents in your systems - So how do we guarantee that the AI make the game *better*? --- # Goal of AI - Realism - One goal of game AI is to provide a challenge to the player and create a realistic, living world. - Examples: - GTA V/RDR 2 - Assassin's Creed Origins - Notice: - People walking around. - Reaction to environment effects (e.g. rain). - Enemies attacking in realistic looking manners. - etc. --- # Bad AI - There are lots of examples of bad AI breaking immersion. - Stupid NPCs getting stuck in corners or getting in your way. - The design of the level needs to take account of the NPCs' ability to navigate it. - Hence you normally get large doorways and corridors. - Unfortunately, the AI, NPCs, and levels are normally designed by different teams. - So it doesn't normally work first time. - At some point compromises have to be made. - If the NPC is on the player's side you need to make sure it does not let them down. - Halo, Fallout 4, Oblivion, all show examples of this --- # Golden Eye 007 'Protect Natalya'  --- # AI and Game Design - When the game designer comes up with an idea, they have a vision of how the game will play. - A game is meant to be a carefully crafted experience for the player. - AI can and does bring unpredictability to the game. - The game designer might not want unpredictable behaviour. - Developers may override the AI decisions for the sake of gameplay. --- # AI and Game Design (cont.) - Many examples of 'great AI' don't have very complicated AI... - How effective the AI appears is down to more than just the algorithm - How well tagged is the level? - How is the level designed? (F.E.A.R. / Half-Life) - Do the mechnics support the AI? (Civ V) - How much does the player see? --- # Cheating AI - Many game AI systems cheat. - Pro Evolution Soccer - Sometimes this is referred to as rubber band AI. - A term originally coined in racing games. - Opposition always appeared to keep up with you no matter how well you drove. - Opposition was considered to be on a rubber band attached to the player. --- # Cheating AI <iframe width="1400" height="800" src="https://www.youtube.com/embed/HIZmQ7F1EZg" frameborder="0" allow="accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture" allowfullscreen=""></iframe> --- # Non-Cheating AI - This can also happen in reverse! - If your AI is too good, people will think it cheats. - This was the case in Farcry 1 - Most Backgammon games get accused of this too - This is partly why most FPS enemies shout what they are doing --- # Summary - We have looked at a very broad picture of what game AI is. - Essentially, use classical, deterministic techniques. - We also introduced some techniques that are used in games. - Movement - Decision making - Strategy - Learning --- # Remember - AI can sometimes not work how the player (or designer) wants. - Bad AI - Cheating AI - Unfun AI - All these areas are worth considering depending on your game. Just think about the time you have and the experience you are aiming for.