# Lecture 13 - 2D Physics ### SET09121 - Games Engineering <br /><br /> Leni Le Goff <br /> School of Computing. Edinburgh Napier University --- # Recommended Reading (Optional) - Game Physics Engine Development, Millington. - If you ever want to build your own physics engine this is the book. - It does introduce some of the physics concepts well. - Not required for this module.  <!-- .element width="30%" --> --- # What do we mean by game physics? <iframe width="1400" height="800" src="https://www.youtube.com/embed/xh6bhBAO7vQ" frameborder="0" allow="accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture" allowfullscreen=""></iframe> --- # What do we mean by game physics? <iframe width="1400" height="800" src="https://www.youtube.com/embed/tugbGpRqiFY" frameborder="0" allow="accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture" allowfullscreen=""></iframe> --- # Game Physics - Game physics is really only a small subset of physics theory. - Game physics uses classical mechanics to provide the basic movement of objects in the game world. - We will look at the Laws of Motion for example. - Other physics models are used in some areas of games. - Fluid dynamics for example. - Most advanced rendering techniques rely on physics concepts. - Optics, etc. --- # Physics Engine - Game physics is almost always provided by a third-party engine. - It used to be that a game studio required someone with a Masters or PhD in Physics. - We will use Box2D as our physics engine. - There are a number of industry used, free, physics engines out there.  <!-- .element width="30%" -->  <!-- .element width="30%" -->  <!-- .element width="30%" --> --- # Collision Detection - Collision detection is not strictly part of a physics engine. - The physics engine concerns itself with resolving collisions. - So we need to be able to detect them in the first place. - There are numerous techniques to detect collisions in 2D and 3D - from fast and more approximate to slow and more accurate. 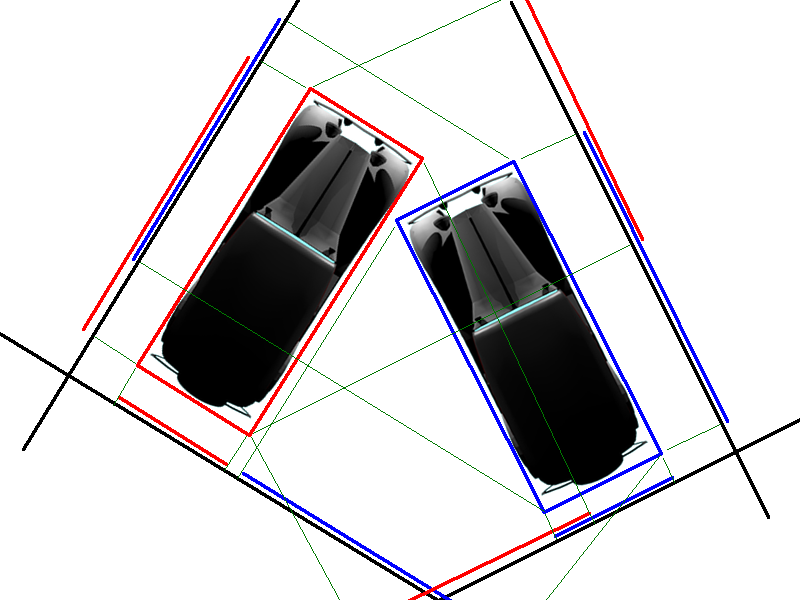 <!-- .element width="50%" --> --- # Particle Simulation - Particle simulation forms the basis of many physics engines. - Particles are simply simulated elements (points) that we can apply the Laws of Motion to. - Particles have a position, velocity, acceleration, etc. - Particles are used for numerous graphical effects. - For example, smoke, fire, explosions, water, etc. 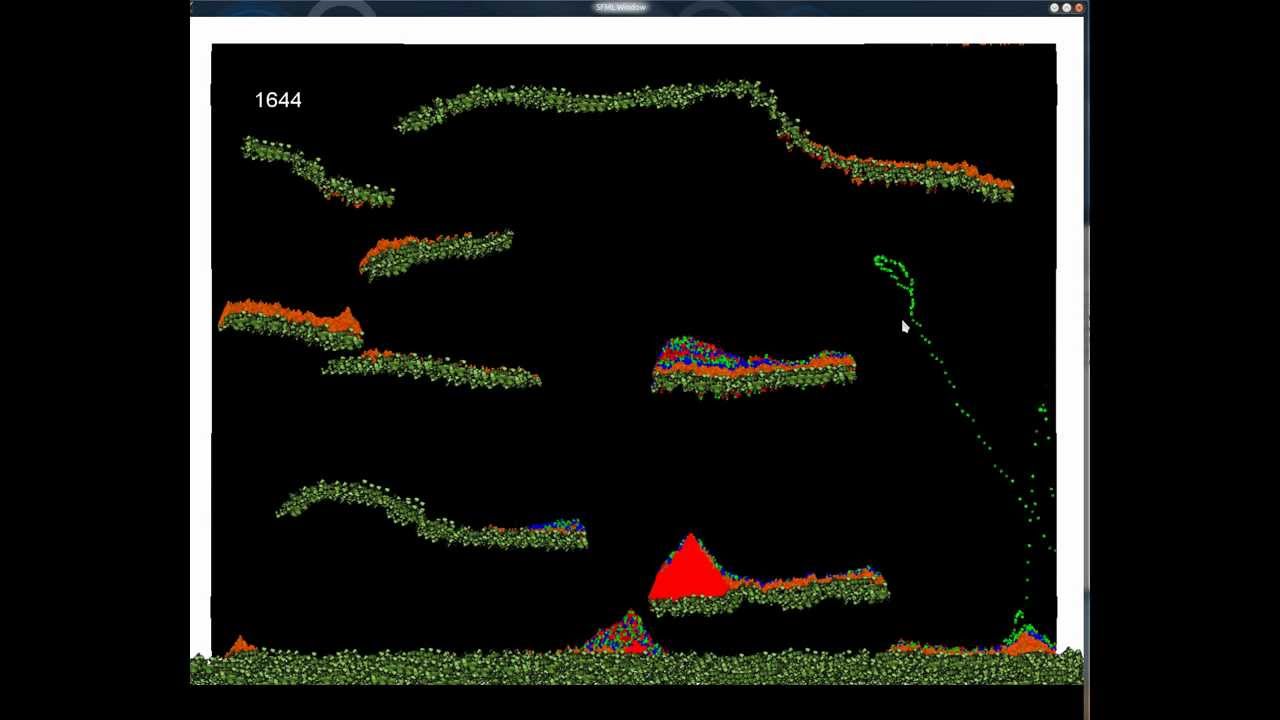<!-- .element width="60%" --> --- # Rigid Body Dynamics - Rigid bodies is about how geometric objects move and interact. - Unlike particles, rigid bodies have a shape. This means that they *translate* and *rotate*. - The bodies are rigid as they do not change shape, they are *not deformable*.  --- # Bringing them Together - Collision detection (intersection testing) lets us find out which bodies have come into contact. - Particle physics allow us to control the motion of objects without taking into account their size and shape. - Rigid body dynamics let us model how geometric objects interact. - Rigid body dynamics also let us determine what happens when two objects collide: **Collision resolution** - Box2D provides these core features (and a bit more) so we can do almost any type of 2D physical effect you can think of. --- # Example - Collision Detection <iframe width="1400" height="800" src="https://www.youtube.com/embed/qTV3ZQgTnkg" frameborder="0" allow="accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture" allowfullscreen=""></iframe> --- # Example - Particle Simulation <iframe width="1400" height="800" src="https://www.youtube.com/embed/YeNeod0qfPY" frameborder="0" allow="accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture" allowfullscreen=""></iframe> --- # Example - Rigid Bodies <iframe width="1400" height="800" src="https://www.youtube.com/embed/LnvtZn2agmA" frameborder="0" allow="accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture" allowfullscreen=""></iframe> --- # Example - Water Simulation <iframe width="1400" height="800" src="https://www.youtube.com/embed/zMTzWLGcPEk" frameborder="0" allow="accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture" allowfullscreen=""></iframe> --- ## Fundamentals - Laws of Motion --- # What are the Laws of Motion? - Game physics are underpinned by Newton's Three Laws of Motion. - First described by Isaac Newton in the 17th century. - **Newton's laws of motion** are: 1. Law of inertia 2. Force produces motion ($F = ma$) 3. Law of action and reaction - There are also Euler's Two Laws of Rigid Body Motion which we won't discuss here. --- # Newton's First Law of Motion - Law of inertia: - A body remains at rest, or in motion at a constant speed in a straight line, unless acted upon by a force. - Basically, if there is no force there is no change in velocity. - If $F_{net} = 0$ then there is no **change** in motion. - Where: - $F_{net}$ is the combined force applied to the object. - Opposite forces can cancel each other out. --- # Newton's Second Law of Motion - Force produces motion - When a body is acted upon by a force, it accelerates proportionally to its mass and the force applied, towards the direction of the force - This is an important calculation, and normally underpins most of the force calculation work in a physics engine. `$$ F = ma $$` where: $m$ is the mass, $a$ is the acceleration. Or: `$$a = \frac{F}{m}$$` --- # Newton's Third Law of Motion - Law of action and reaction - If two bodies exert forces on each other, these forces have the same magnitude but opposite directions. - The law comes into play when working with collision resolution.  --- # Equations of Motion <div style="float: left;width: 40%;"> `$$ v = u + at $$`<br /> `$$ s = \frac{1}{2}(u + v)t $$`<br /> `$$ s = ut + \frac{1}{2}at^2 $$`<br /> `$$ s = vt - \frac{1}{2}at^2 $$`<br /> `$$ v^2 = u^2 + 2as $$`<br /> `$$ a = \frac{v - u}{t} $$`<br /> </div> <div style="float: right;width: 60%;text-align: left;"> These equations apply when $a$ is constant.<br /> <br /><br /> \\\(s\\) : object displacement<br /> \\\(u\\) : the initial velocity<br /> \\\(v\\) : the final velocity<br /> \\\(a\\) : the acceleration<br /> \\\(t\\) : (or \\(\Delta t\\)) : the time passed </div> --- # SUVAT  <!-- .element width="100%" --> --- # Simple Gravity - On a planet, gravity is a downward force applied to an object. - Gravitational acceleration $g$ at sea level is approximately equal to $9.82m/s^2$. - As a 2D vector this is $<0, -9.82>$. --- # Weight and Mass - We use the terms weight and mass interchangeably in everyday language. - In physics, weight and mass are different. - Weight is the downward force applied to an object due to gravity and the object's mass. - Mass is the measure of how much matter is in an object. - We use $kg$ for mass. Less gravity means less weight, but the mass will remain the same. $w = mg$ Where: $w$ is weight, $m$ is mass, $g$ is gravity. --- # Forces - Weight is a force. A force is considered to be any influence that can affect the velocity of an object. - Like acceleration $g$, a force is also defined as a vector, having a direction and magnitude. - A Newton is a standard unit of force applied to an object. $$1N = 1kg \times m/s^2$$ On Earth: $$g = 9.8 m/s^2$$ so: $$\frac{1N}{g} = 0.102kg $$ $$ 1kg \times g = 9.8N $$ --- # Adding Forces - When applying forces, we are typically concerned with accumulated force for a particular frame. - Adding forces is just a case of adding the vector forces together and applying the resultant net force to the object.  --- # Force Examples - Springs are commonly used for a number of effects - they do exactly what you think. - In games, springs are used for deformable shapes and bounce effects. Hooke's Law: $$F = -k\Delta s$$ where $k$ is the stiffness of the spring and $s$ the displacement from the resting length. - Drag is another force that is caused by air resistance (or any other medium, e.g. liquid) - Games will use a simplified model of drag: $$F_{drag} = -\hat{\textbf{v}}(k_1\lVert\textbf{v}\rVert + k_2\lVert\textbf{v}\rVert^2)$$ --- # Impulses - Impulses are changes in an object's momentum - "Force acting over time" - Momentum: $p = F\Delta t$ - We can use them instead of forces to handle collision resolution. --- # Impulses (cont.) - Using *impulse* is a easier way to handle change in velocity of an object than using *force*. $$ p = F\Delta t $$ <br /> $$ \equiv p = ma(t_2-t_1) $$<br /> $$ \equiv p = m(v_2 - v_1) $$ <br /> $$ \equiv v_2 = p/m + v_1 $$ <br /> ```cpp void physics_update(double delta_t){ velocity += impulse/mass; position += velocity*delta_t; } ``` --- # Summary **Warning** - Physics effects look good in your game, provide nicer looking movement, and can be used for gameplay. However... - Physics calculations can be expensive. - They also don't always scale well due to the potential number of object interactions. - Collision detection is also expensive. - Be smart! Don't have lots of physical effects on the screen at one time - this can really hit performance! --- # Summary **Warning (cont.)** - Physics engines are not always the best way to make your game *fun*. - This is particularly true if your engine is not deterministic. <!-- .element: class="fragment" --> - Think about games like Sonic the Hedgehog: <!-- .element: class="fragment" --> - Movement should feel good <!-- .element: class="fragment" --> - Movement should be repeatable <!-- .element: class="fragment" --> - Sonic isn't controlled by a physics engine <!-- .element: class="fragment" --> - (But gravity is applied!) <!-- .element: class="fragment" --> --- # Summary - We have taken a very broad overview of what we mean by game physics. - Laws of Motion. - Particles. - Rigid bodies. - Collisions. - Box2D will provide us with all these features and more - you just need to explore it. - The physics lab will introduce most of these ideas practically.